Talrik Jr Pro Robot Kit
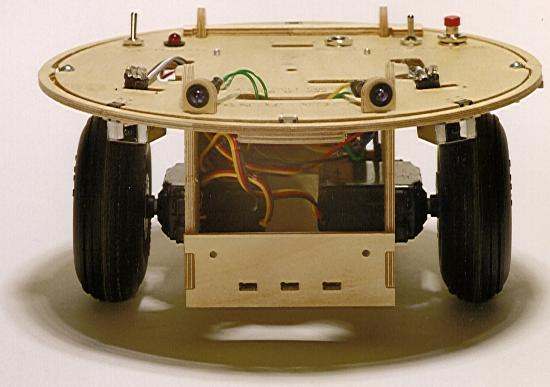
A completely built TJ ProTM robot offers a sophisticated, expandable, programmable, autonomous, mobile robot.
This is a great robot for intermediate and advanced users. The more you learn, the more you’ll be able to do with this robot. TJ ProTM fits into a right circular cylinder of 7 inch diameter & 3 1/2 inch height. TJ ProTM is constructed from beautiful, 5-ply model aircraft birch plywood, or strong black ABS Plastic (your choice) & rides on two 2.75 inch Du-Bro low bounce wheels & a rear skid. Two high quality ball bearing continuous servos drive each wheel. You can buy TJ as an unassembled kit or as a completely ready to go robot!
Motorola HC11 Version: 32 Kbytes of memory (SRAM) with battery memory save mode; Serial Communications Interface with 6-pin header; 8 analog input channels with 3-pin signal, power & ground headers; 4 digital switch inputs with 2-pin headers(uses one of the analog channels); 5 servo controller outputs with 3-pin signal, power & ground headers.
Atmel AVR Version: 128 Kbytes of memory; Serial Communications Interface with 6-pin header; 6 servo/motor(continuous servos) control ports; 23 digital io ports
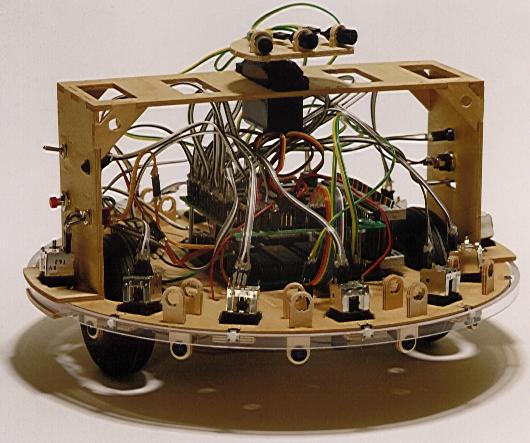
Talrik IVTM offers a sophisticated, expandable, programmable, autonomous, mobile robot. Talrik IVTM fits into a right circular cylinder of 10 inch diameter & 10 inch height. Talrik IV TM is constructed from beautiful, 5-ply model aircraft birch plywood, or strong black ABS Plastic & rides on two 3 inch Du-Bro wheels & a rear caster. Two high quality ball bearing R/C continuous servos drive each wheel. Uses the MEKAVR128; 29 analog sensor channels; 6 servo/motor (continuous servos) control port; 23 digital io ports.
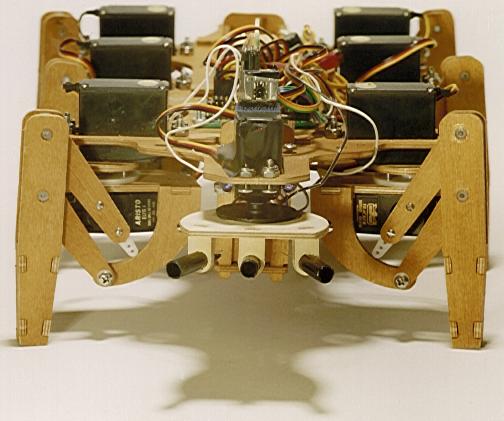
RobobugTM Legs
Each RobobugTM leg is driven by two high quality ball bearing servos to provide two degrees of freedom. One servo provides a sweeping rotation motion from front-to-back & back-to-front. The other leg servo lifts the leg in an up-&-down manner. RobobugTM clears more than 3 inches above the floor in its normal stance. At full leg extension, RobobugTM clears about 4 inches. Appropriately timed servo actuation provided by the MekatronixTM brand proprietary walking algorithm provides the necessary intelligence to enable RobobugTM to walk.
RobobugTM Sensors
Auxiliary sensor kits (not included in the base kit) permit you to implement collision avoidance, IR remote control, & contact sensation (momentary tactile switch) at the “feet”. You can mount IR detectors & emitters on the front of the robot or on a MekatronixTM brand pan-head (extra servo sold separately). You can write programs to sweep the head back & forth to provide wide angle coverage of the sensors that you mount on the head, e.g., IR, sonar, visible light.
RobobugTM Construction
RobobugTM is constructed from beautiful, 5-ply model aircraft birch plywood. The main body is slightly more than 15 1/2 inches long while the body-plus-leg-projection width approximately equals 10 3/4 inches. RobobugTM‘s front section allows the attachment of an optional, servo-controlled, pan head on which sensors can be mounted. Leg joints use nylon bushings to decrease friction. The hollow legs allow sensor wiring to pass from the foot to the “knee” joint without being exposed or susceptible to snagging onto objects. RobobugTM‘s spinal column furnishes a convenient secure passageway to thread the twelve, 3-wire, servo cables from the legs to the MSCC11 microcontroller. The spinal configuration & “efferent nerve” wires readily yield their source of inspiration!
RobobugTM Power Requirements
Five NiCad rechargeable C-cell batteries fit into RobobugTM‘s body cavity to power the servos while a 9 volt NiCad battery powers the electronics. Regular capacity C-cells provide about 15 minutes of walking before recharge is necessary. Higher capacity C-cells can produce twice that amount of time.
RobobugTM Spinal Column ControllerTM Uses the MEKAVR128; 29 analog sensor channels; 6 servo/motor (continuous servos) control ports; 23 digital io ports